PID 遙控小車
Homework Report Format
PID 遙控小車
- 應用與功能說明
- 自動修正路徑
- 藍芽遠端操控
- 設計考量與所需相關技術
- 操作方式:透過藍芽連線操控自走小車
- 移動方式:兩輪驅動
- 供電方式:電池或電腦USB
- 連線方式:WiFi或藍芽
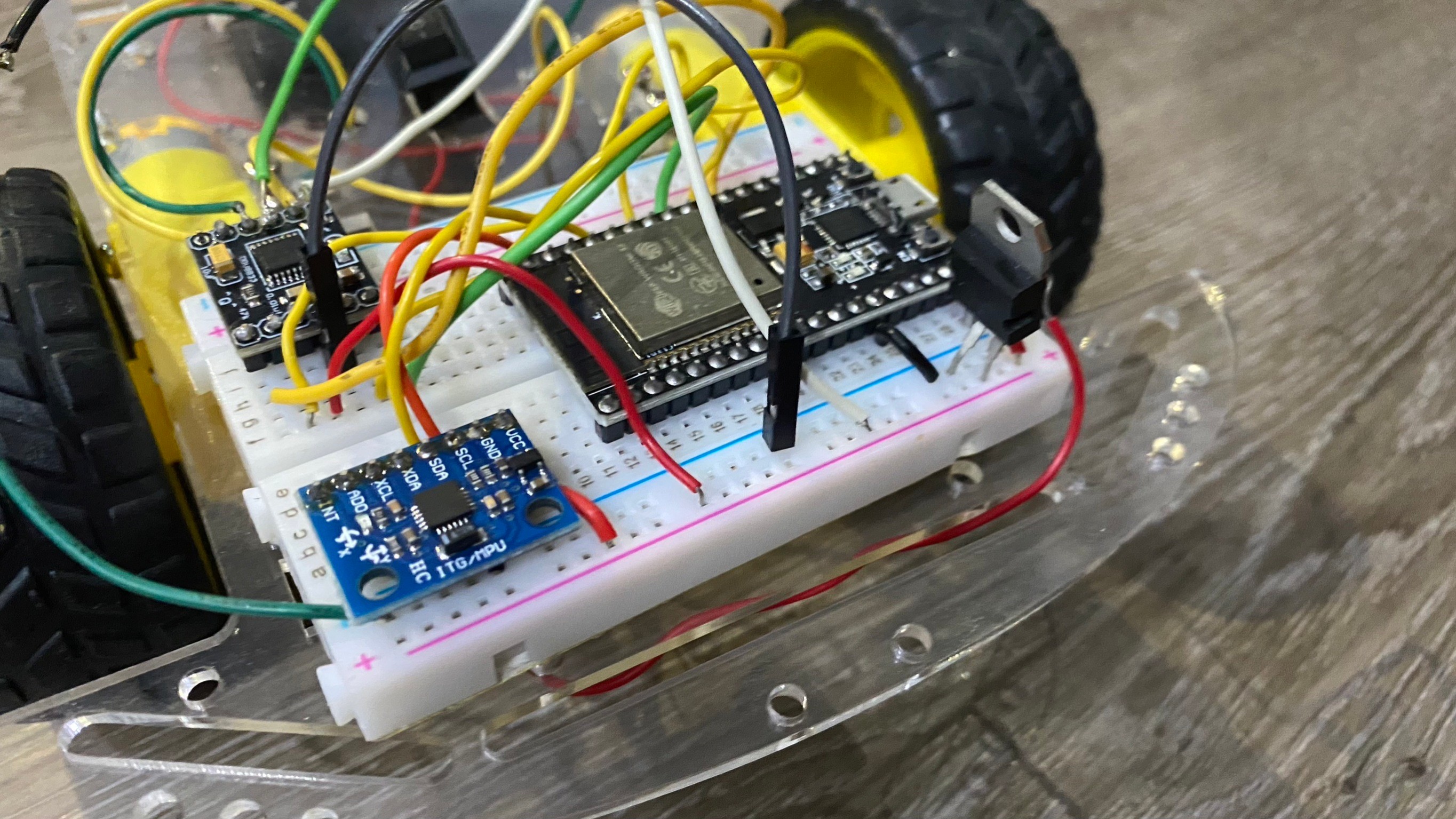
- 方位感測元件:MPU6050
- 驅動裝置:DRV8833
- 系統方塊圖

- 實作照片


- 位置偵測
- 實際操作
- 程式碼
//
// RoboCar with MPU6050 using PID control for going straight line
// by Richard Kuo, NTOU/EE
//
#include <Wire.h>
#include <ESP32MotorControl.h>
#include <MPU6050_6Axis_MotionApps20.h>
// MPU6050 : Inertial Measurement Unit
MPU6050 mpu;
//MPU6050 mpu(0x69); // <-- use for AD0 high
#define IN1pin 16
#define IN2pin 17
#define IN3pin 18
#define IN4pin 19
#define motorR 0
#define motorL 1
ESP32MotorControl motor;
// MPU control/status vars
bool dmpReady = false; // set true if DMP init was successful
uint8_t mpuIntStatus; // holds actual interrupt status byte from MPU
uint8_t devStatus; // return status after each device operation (0 = success, !0 = error)
uint16_t packetSize; // expected DMP packet size (default is 42 bytes)
uint16_t fifoCount; // count of all bytes currently in FIFO
uint8_t fifoBuffer[64]; // FIFO storage buffer
// orientation/motion vars
Quaternion q; // [w, x, y, z] quaternion container
VectorInt16 aa; // [x, y, z] accel sensor measurements
VectorInt16 aaReal; // [x, y, z] gravity-free accel sensor measurements
VectorInt16 aaWorld; // [x, y, z] world-frame accel sensor measurements
VectorFloat gravity; // [x, y, z] gravity vector
float euler[3]; // [psi, theta, phi] Euler angle container
float ypr[3]; // [yaw, pitch, roll] yaw/pitch/roll container and gravity vector
// packet structure for InvenSense teapot demo
uint8_t teapotPacket[14] = { '$', 0x02, 0,0, 0,0, 0,0, 0,0, 0x00, 0x00, '\r', '\n' };
static float preHeading, Heading, HeadingTgt;
// PID tuning method : Ziegler-Nichols method
const int Ku = 10;
const int Tu = 100;
const int Kp = 0.6 * Ku;
const int Ki = 1.2 * Ku / Tu;
const int Kd = 3 * Ku * Tu /40;
// PWM freq : NodeMCU = 1KHz, UNO = 500Hz
// PWM duty NodeMCU = 1023 (10-bit PWM), UNO = 255 (8-bit PWM)
#define PWM_FULLPOWER 1023
int USR_FullPower;
int USR_MotorPower;
int PID_FullPower;
int PID_MotorPower;
#define CMD_STOP 0
#define CMD_FORWARD 1
#define CMD_BACKWARD 2
#define CMD_RIGHT 3
#define CMD_LEFT 4
int command;
int angle;
// TB6612FNG : Full-Bridge DC Motor Driver
#define STBY D0
#define PWMA D3
#define AIN2 D4
#define AIN1 D5
#define BIN1 D6
#define BIN2 D7
#define PWMB D8
// value 1 or -1 for motor spining default
const int offsetA = 1;
const int offsetB = 1;
// Interrup Service Routine (ISR)
volatile bool mpuInterrupt = false; // indicates whether MPU interrupt pin has gone high
void dmpDataReady() {
mpuInterrupt = true;
}
void setup() {
Wire.begin();
Wire.setClock(400000);
Serial.begin(115200);
Serial.println("NodeMCU RoboCar with IMU");
motor.attachMotors(IN1pin, IN2pin, IN3pin, IN4pin);
motor.motorStop(motorR);
motor.motorStop(motorL);
mpu.initialize();
devStatus = mpu.dmpInitialize();
// initialize device
Serial.println(F("Initializing I2C devices...f="));
mpu.initialize();
// verify connection
Serial.println(F("Testing device connections..."));
Serial.println(mpu.testConnection() ? F("MPU6050 connection successful") : F("MPU6050 connection failed"));
// wait for ready
Serial.println(F("\nSend any character to begin DMP programming and demo: "));
/*while (Serial.available() && Serial.read()); // empty buffer
while (!Serial.available()); // wait for data
while (Serial.available() && Serial.read()); // empty buffer again*/
// load and configure the DMP
Serial.println(F("Initializing DMP..."));
devStatus = mpu.dmpInitialize();
// supply your own gyro offsets here, scaled for min sensitivity
// Note - use the 'raw' program to get these.
// Expect an unreliable or long startup if you don't bother!!!
mpu.setXGyroOffset(220);
mpu.setYGyroOffset(76);
mpu.setZGyroOffset(-85);
mpu.setZAccelOffset(1788);
// make sure it worked (returns 0 if so)
if (devStatus == 0) {
// turn on the DMP, now that it's ready
Serial.println(F("Enabling DMP..."));
mpu.setDMPEnabled(true);
// enable Arduino interrupt detection
Serial.println(F("Enabling interrupt detection (Arduino external interrupt 0)..."));
attachInterrupt(0, dmpDataReady, RISING);
mpuIntStatus = mpu.getIntStatus();
// set our DMP Ready flag so the main loop() function knows it's okay to use it
Serial.println(F("DMP ready! Waiting for first interrupt..."));
dmpReady = true;
// get expected DMP packet size for later comparison
packetSize = mpu.dmpGetFIFOPacketSize();
} else {
// ERROR!
// 1 = initial memory load failed
// 2 = DMP configuration updates failed
// (if it's going to break, usually the code will be 1)
Serial.print(F("DMP Initialization failed (code "));
Serial.print(devStatus);
Serial.println(F(")"));
}
// read heading till it is stable
for (int i=0;i<200;i++) {
GetHeading(&Heading);
delay(100);
}
// set command & angle for moving RoboCar
command = CMD_FORWARD; // CMD_RIGHT
angle = 0; // +60
switch(command) {
case CMD_STOP:
USR_FullPower = 0;
PID_FullPower = 0;
break;
case CMD_FORWARD:
USR_FullPower = PWM_FULLPOWER * 3/4;
PID_FullPower = PWM_FULLPOWER - USR_FullPower;
break;
case CMD_BACKWARD:
USR_FullPower = PWM_FULLPOWER * 3/4;
PID_FullPower = PWM_FULLPOWER - USR_FullPower;
break;
case CMD_RIGHT:
USR_FullPower = PWM_FULLPOWER * 1/4;
PID_FullPower = PWM_FULLPOWER - USR_FullPower;
break;
case CMD_LEFT:
USR_FullPower = PWM_FULLPOWER * 1/4;
PID_FullPower = PWM_FULLPOWER - USR_FullPower;
break;
default:
USR_FullPower = 0;
PID_FullPower = 0;
break;
}
// set target heading to default heading
GetHeading(&Heading);
HeadingTgt = Heading + angle;
if (HeadingTgt>=360) HeadingTgt = HeadingTgt - 360;
else if (HeadingTgt<0) HeadingTgt = HeadingTgt + 360;
Serial.print("Heading Target = \t");
Serial.println(HeadingTgt);
}
void loop() {
const int Moving = 1;
if (!dmpReady) return;
// NOT USING MPU6050 INT pin
// wait for MPU interrupt or extra packet(s) available
//while (!mpuInterrupt && fifoCount < packetSize) {
//} // 100Hz Fast Loop
GetHeading(&Heading);
Serial.print("Yaw:\t");
Serial.print(Heading);
Serial.print("\t");
Serial.println(HeadingTgt);
PID(Heading,HeadingTgt,&PID_MotorPower, Kp, Ki , Kd, Moving);
USR_MotorPower = USR_FullPower; // assign User defined full power
Serial.print("Power:\t"); ;
Serial.print(USR_MotorPower);
Serial.print("\t");
Serial.println(PID_MotorPower);
if (Heading==HeadingTgt) PID_MotorPower = 0;
switch (command) {
case CMD_STOP:
motor.motorForward(motorR,USR_MotorPower - PID_MotorPower);
motor.motorForward(motorL,USR_MotorPower + PID_MotorPower);
break;
case CMD_FORWARD:
motor.motorForward(motorR,USR_MotorPower - PID_MotorPower);
motor.motorForward(motorL,USR_MotorPower + PID_MotorPower);
break;
case CMD_BACKWARD:
motor.motorForward(motorR,-USR_MotorPower - PID_MotorPower);
motor.motorForward(motorL,-USR_MotorPower + PID_MotorPower);
break;
case CMD_RIGHT:
motor.motorForward(motorR, USR_MotorPower - PID_MotorPower);
motor.motorForward(motorL,-USR_MotorPower + PID_MotorPower);
break;
case CMD_LEFT:
motor.motorForward(motorR,-USR_MotorPower + PID_MotorPower);
motor.motorForward(motorL, USR_MotorPower - PID_MotorPower);
break;
default:
motor.motorForward(motorR,USR_FullPower - PID_MotorPower);
motor.motorForward(motorL,USR_FullPower + PID_MotorPower);
break;
}
}
void GetHeading(float *Heading)
{
//calc heading from IMU
// reset interrupt flag and get INT_STATUS byte
mpuInterrupt = false;
mpuIntStatus = mpu.getIntStatus();
// get current FIFO count
fifoCount = mpu.getFIFOCount();
// check for overflow (this should never happen unless our code is too inefficient)
if ((mpuIntStatus & 0x10) || fifoCount == 1024) {
// reset so we can continue cleanly
mpu.resetFIFO();
Serial.println(F("FIFO overflow!"));
// otherwise, check for DMP data ready interrupt (this should happen frequently)
}
else if (mpuIntStatus & 0x02)
{
// wait for correct available data length, should be a VERY short wait
while (fifoCount < packetSize) fifoCount = mpu.getFIFOCount();
// read a packet from FIFO
mpu.getFIFOBytes(fifoBuffer, packetSize);
// track FIFO count here in case there is > 1 packet available
// (this lets us immediately read more without waiting for an interrupt)
fifoCount -= packetSize;
// display Euler angles in degrees
mpu.dmpGetQuaternion(&q, fifoBuffer);
mpu.dmpGetGravity(&gravity, &q);
mpu.dmpGetYawPitchRoll(ypr, &q, &gravity);
*Heading = int((ypr[0] * 180/M_PI)) + 180;
}//done
}//END GetHeading
void PID(float Heading,float HeadingTarget,int *Power, float kP,float kI,float kD, byte Moving)
{
static unsigned long lastTime;
static float Output;
static float errSum, lastErr,error ;
// IF not moving then
if(!Moving)
{
errSum = 0;
lastErr = 0;
return;
}
//error correction for angular overlap
error = Heading-HeadingTarget;
if(error<180)
error += 360;
if(error>180)
error -= 360;
//http://brettbeauregard.com/blog/2011/04/improving-the-beginners-pid-introduction/
/*How long since we last calculated*/
unsigned long now = millis();
float timeChange = (float)(now - lastTime);
/*Compute all the working error variables*/
//float error = Setpoint - Input;
errSum += (error * timeChange);
//integral windup guard
LimitFloat(&errSum, -300, 300);
float dErr = (error - lastErr) / timeChange;
/*Compute PID Output*/
*Power = kP * error + kI * errSum + kD * dErr;
/*Remember some variables for next time*/
lastErr = error;
lastTime = now;
//limit demand
LimitInt(Power, - PID_FullPower, PID_FullPower);
}//END getPID
void LimitInt(int *x,int Min, int Max)
{
if(*x > Max)
*x = Max;
if(*x < Min)
*x = Min;
}//END LimitInt
//
// Clamp a float between a min and max. Note doubles are the same
// as floats on this platform.
void LimitFloat(float *x,float Min, float Max)
{
if(*x > Max)
*x = Max;
if(*x < Min)
*x = Min;
}//END LimitInt
This site was last updated June 04, 2023.